Emgu-WPF 激光雷达研究-移动物体跟踪
本文共 452 字,大约阅读时间需要 1 分钟。
原文:
接前两篇博客:
https://blog.csdn.net/u013224722/article/details/80738619
https://blog.csdn.net/u013224722/article/details/80738995
以及仅用WPF处理:绘制2D激光实时图
基于以上博客中步骤的研究基础上,终于初步实现了对移动物体的追踪算法。 先上效果图:
激光雷达每一组采集的数据(我用“帧数据”描述),当我检测到移动物体时(我简称为“障碍物”),我将该组障碍物信息存入链表;下一帧数据到来后,我实现的算法会重新检测出一组障碍物信息数据。通过我的匹配算法实现对前后两组数据进行检测和匹配。同一障碍物用同一个颜色进行标记。目前尚未加大测试点进行综合测试,算法实现基于前两篇博客的数据进行,后续持续尝试优化完善。(1-2个障碍物测试)。
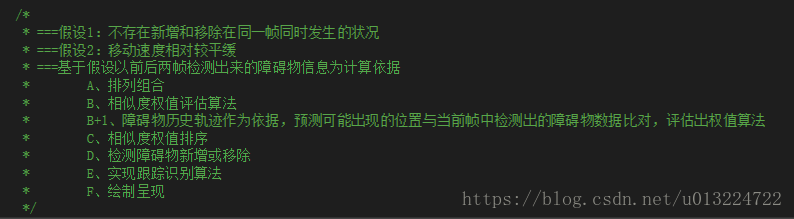
由于激光雷达采集的仅为距离数据,无法跟摄像头或深度相机采集的数据可以通过图像处理得到较多的特征因子已进行计算。所以我的算法完全基于数据进行。思路:
你可能感兴趣的文章
nginx在reload时候报错invalid PID number
查看>>
ElasticSearch 2 (32) - 信息聚合系列之范围限定
查看>>
VS2010远程调试C#程序
查看>>
[MicroPython]TurniBit开发板DIY自动窗帘模拟系统
查看>>
Python3.4 12306 2015年3月验证码识别
查看>>
从Handler.post(Runnable r)再一次梳理Android的消息机制(以及handler的内存泄露)
查看>>
windows查看端口占用
查看>>
Yii用ajax实现无刷新检索更新CListView数据
查看>>
JDBC的事务
查看>>
Io流的概述
查看>>
App 卸载记录
查看>>
JavaScript变量和作用域
查看>>
开源SIP服务器加密软件NethidPro升级
查看>>
作业:实现简单的shell sed替换功能和修改haproxy配置文件
查看>>
Altium 拼板方法以及 注意的 地方
查看>>
Apache Pulsar中的地域复制,第1篇:概念和功能
查看>>
python pip install 出现 OSError: [Errno 1] Operation not permitted
查看>>
oracle12C 重做日志
查看>>
从源码分析scrollTo、scrollBy、Scroller方法的区别和作用
查看>>
ObjectOutputStream和ObjectInputStream
查看>>